Design a PI controller to drive the step response error to zero for the unity feedback system shown in Figure P9.1, where G(s) = \(\frac{K}{(s+1)^2(s+10)}\) The system operates with a damping ratio of 0.6. Compare the specifications of the uncompensated and compensated systems. [Section: 9.2]
Read moreTable of Contents
1
INTRODUCTION
2
MODELING IN THE FREQUENCY DOMAIN
3
MODELING IN THE TIME DOMAIN
4
TIME RESPONSE
5
REDUCTION OF MULTIPLE SUBSYSTEMS
6
STABILITY
7
STEADY-STATE ERRORS
8
ROOT LOCUS TECHNIQUES
9
DESIGN VIA ROOT LOCUS
10
FREQUENCY RESPONSE TECHNIQUES
11
DESIGN VIA FREQUENCY RESPONSE
12
DESIGN VIA STATE SPACE
13
DIGITAL CONTROL SYSTEMS
Textbook Solutions for Control Systems Engineering
Chapter 9 Problem 48
Question
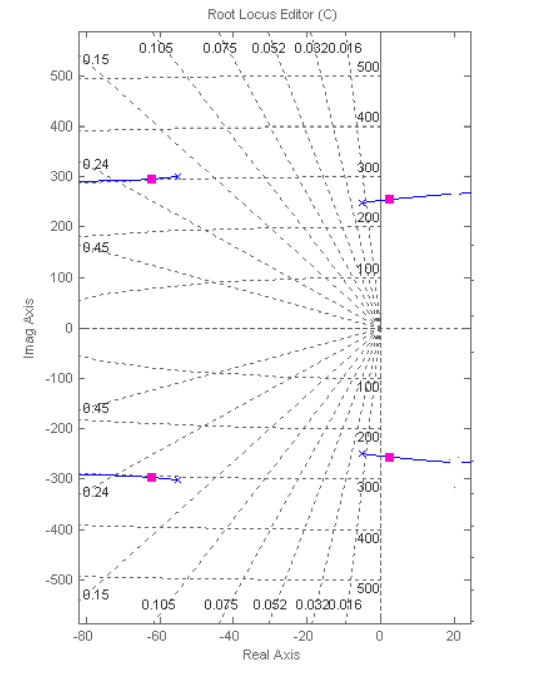
Repeat Problem 47 using a lag-lead compensator instead of a PID controller. Design for a steady-state error of 1% for a step input command.
Solution
Step 1 of 3
a.
The root locus for the uncompensated system is shown in next. The range for closed loop stability is 


Subscribe to view the
full solution
full solution
Title
Control Systems Engineering 7
Author
Norman J. Nise
ISBN
9781118170519
Repeat using a lag-lead compensator instead of a PID
Chapter 9 textbook questions
-
Chapter 9: Problem 1 Control Systems Engineering 7
-
Chapter 9: Problem 2 Control Systems Engineering 7
Consider the unity feedback system shown in Figure P9.1, where G(s) = \(\frac{K}{s(s+3)(s+6)}\) a. Design a PI controller to drive the ramp response error to zero for any K that yields stability. [Section: 9.2] b. Use MATLAB to simulate your design for K = 1. Show both the input ramp and the output response on the same plot.
Read more -
Chapter 9: Problem 3 Control Systems Engineering 7
The unity feedback system shown in Figure P9.1 with G(s) = \(\frac{K}{(s+2)(s+3)(s+7)}\) is operating with 10% overshoot. [Section: 9.2] a. What is the value of the appropriate static error constant? b. Find the transfer function of a lag network so that the appropriate static error constant equals 4 without appreciably changing the dominant poles of the uncompensated system. c. Use MATLAB or any other computer program to simulate the system to see the effect of your compensator.
Read more -
Chapter 9: Problem 4 Control Systems Engineering 7
Repeat Problem 3 for G(s) = \(\frac{K}{s(s+3)(s+7)}\). [Section: 9.2]
Read more -
Chapter 9: Problem 5 Control Systems Engineering 7
Consider the unity feedback system shown in Figure P9.1 with G(s) = \(\frac{K}{(s+3)(s+5)(s+7)}\) a. Design a compensator that will yield \(K_p\) = 20 without appreciably changing the dominant pole location that yields a 10% overshoot for the uncompensated system. [Section: 9.2] b. Use MATLAB or any other computer program to simulate the uncompensated and compensated systems. c. Use MATLAB or any other computer program to determine how much time it takes the slow response of the lag compensator to bring the output to within 2% of its final compensated value.
Read more -
Chapter 9: Problem 6 Control Systems Engineering 7
The unity feedback system shown in Figure P9.1 with G(s) = \(\frac{K(s+6)}{(s+2)(s+3)(s+5)}\) is operating with a dominant-pole damping ratio of 0.707. Design a PD controller so that the settling time is reduced by a factor of 2 . Compare the transient and steady-state performance of the uncompensated and compensated systems. Describe any problems with your design. [Section: 9.3]
Read more -
Chapter 9: Problem 7 Control Systems Engineering 7
Redo Problem 6 using MATLAB in MATLAB the following way: a. MATLAB will generate the root locus for the uncompensated system along with the 0.707 damping ratio line. You will interactively select the operating point. MATLAB will then inform you of the coordinates of the operating point, the gain at the operating point, as well as the estimated %OS, \(T_S\), \(T_p\), \(\zeta\), \(\omega_n\), and \(K_p\) represented by a second order approximation at the operating point. b. MATLAB will display the step response of the uncompensated system. c. Without further input, MATLAB will calculate the compensated design point and will then ask you to input a value for the PD compensator zero from the keyboard. MATLAB will respond with a plot of the root locus showing the compensated design point. MATLAB will then allow you to keep changing the PD compensator value from the keyboard until a root locus is plotted that goes through the design point. d. For the compensated system, MATLAB will inform you of the coordinates of the operating point, the gain at the operating point,as well as the estimated %S, \(T_s\), \(T_p\), \(\zeta\), \(\omega_n\), and \(K_p\) represented by a second-order approximation at the operating point. e. MATLAB will then display the step response of the compensated system.
Read more -
Chapter 9: Problem 8 Control Systems Engineering 7
Design a PD controller for the system shown in Figure P9.2 to reduce the settling time by a factor of 4 while continuing to operate the system with 20.5% overshoot. Compare the performance of the compensated system to that of the uncompensated system. Summarize the results in a table similar to that in Example 9.7.
Read more -
Chapter 9: Problem 9 Control Systems Engineering 7
Consider the unity feedback system shown in Figure P9.1 with [Section: 9.3] G(s) = \(\frac{K}{(s+5)^3}\) a. Find the location of the dominant poles to yield a 1.2 second settling time and an overshoot of 15%. b. If a compensator with a zero at -1 is used to achieve the conditions of Part a, what must the angular contribution of the compensator pole be? c. Find the location of the compensator pole. d. Find the gain required to meet the requirements stated in Part a. e. Find the location of other closed-loop poles for the compensated system. f. Discuss the validity of your second-order approximation. g. Use MATLAB or any other computer program to simulate the compensated system to check your design.
Read more -
Chapter 9: Problem 10 Control Systems Engineering 7
The unity feedback system shown in Figure P9.1 with G(s) = \(\frac{K}{s^2}\) is to be designed for a settling time of 1.667 seconds and a 16.3% overshoot. If the compensator zero is placed at -1, do the following:[Section: 9.3] a. Find the coordinates of the dominant poles. b. Find the compensator pole. c. Find the system gain. d. Find the location of all non dominant poles. e. Estimate the accuracy of your second-order approximation. f. Evaluate the steady-state error characteristics. g. Use MATLAB or any other computer program to simulate the system and evaluate the actual transient response characteristics for a step input.
Read more -
Chapter 9: Problem 11 Control Systems Engineering 7
Given the unity feedback system of Figure P9.1, with G(s) = \(\frac{K(s+6)}{(s+3)(s+4)(s+7)(s+9)}\) do the following: [Section: 9.3] a. Sketch the root locus. b. Find the coordinates of the dominant poles for which \(\zeta\) = 0.8. c. Find the gain for which \(\zeta\) = 0.8. d. If the system is to be cascade-compensated so that \(T_s\) = 1 second and \(\zeta\) = 0.8, find the compensator pole if the compensator zero is at -4.5. e. Discuss the validity of your second-order approximation. f. Use MATLAB or any other computer program to simulate the compensated and uncompensated systems and compare the results to those expected.
Read more -
Chapter 9: Problem 12 Control Systems Engineering 7
Redo Problem 11 using MATLAB in the following way: a. MATLAB will generate the root locus for the uncompensated system along with the 0.8 damping ratio line. You will interactively select the operating point. MATLAB will then inform you of the coordinates of the operating point, the gain at the operating point, as well as the estimated %S, \(T_S\), \(T_p\), \(\zeta\), \(\omega_n\), and \(K_p\) represented by a second order approximation at the operating point. b. MATLAB will display the step response of the uncompensated system. c. Without further input, MATLAB will calculate the compensated design point and will then ask you to input a value for the lead compensator pole from the keyboard. MATLAB will respond with a plot of the root locus showing the compensated design point. MATLAB will then allow you to keep changing the lead compensator pole value from the keyboard until a root locus is plotted that goes through the design point. d. For the compensated system, MATLAB will inform you of the coordinates of the operating point, the gain at the operating point, as well as the estimated %S, \(T_s\), \(T_p\), \(\zeta\), \(\omega_n\), and \(K_p\) represented by a second-order approximation at the operating point. e. MATLAB will then display the step response of the compensated system. f. Change the compensator's zero location a few times and collect data on the compensated system to see if any other choices of compensator zero yield advantages over the original design.
Read more -
Chapter 9: Problem 13 Control Systems Engineering 7
Consider the unity feedback system of Figure P9.1 with G(s) = \(\frac{K}{s(s+20)(s+40)}\) The system is operating at 20% overshoot. Design a compensator to decrease the settling time by a factor of 2 without affecting the percent overshoot and do the following: [Section: 9.3] a. Evaluate the uncompensated system's dominant poles, gain, and settling time. b. Evaluate the compensated system's dominant poles and settling time. c. Evaluate the compensator's pole and zero. Find the required gain. d. Use MATLAB or any other computer program to simulate the ML compensated and uncompensated systems’ step response.
Read more -
Chapter 9: Problem 14 Control Systems Engineering 7
The unity feedback system shown in Figure P9.1 with G(s) = \(\frac{K}{(s+15)\left(s^2+6 s+13\right)}\) is operating with 30% overshoot. [Section: 9.3] a. Find the transfer function of a cascade compensator, the system gain, and the dominant pole location that will cut the settling time in half if the compensator zero is at -7. b. Find other poles and zeros and discuss your second order approximation. c. Use MATLAB or any other computer program to simulate both the uncompensated and compensated systems to see the effect of your compensator.
Read more -
Chapter 9: Problem 15 Control Systems Engineering 7
For the unity feedback system of Figure P9.1 with G(s) = \(\frac{K}{s(s+1)\left(s^2+10 s+26\right)}\) do the following: [Section: 9.3] a. Find the settling time for the system if it is operating with 15% overshoot. b. Find the zero of a compensator and the gain, K, so that the settling time is 7 seconds. Assume that the pole of the compensator is located at -15. c. Use MATLAB or any other computer program to simulate the system's step response to test the compensator.
Read more -
Chapter 9: Problem 16 Control Systems Engineering 7
A unity feedback control system has the following forward transfer function: [Section: 9.3] G(s) = \(\frac{K}{s^2(s+4)(s+12)}\) a. Design a lead compensator to yield a closed-loop step response with 20.5% overshoot and a settling time of 3 seconds. Be sure to specify the value of K. b. Is your second-order approximation valid? c. Use MATLAB or any other computer program to simulate ML and compare the transient response of the compensated system to the predicted transient response.
Read more -
Chapter 9: Problem 17 Control Systems Engineering 7
For the unity feedback system of Figure P9.1, with G(s) = \(\frac{K}{\left(s^2+20 s+101\right)(s+20)}\) the damping ratio for the dominant poles is to be 0.4, and the settling time is to be 0.5 second. [Section: 9.3] a. Find the coordinates of the dominant poles. b. Find the location of the compensator zero if the compensator pole is at -15. c. Find the required system gain. d. Compare the performance of the uncompensated and compensated systems. e. Use MATLAB or any other computer program to simulate the system to check your design. Redesign if necessary.
Read more -
Chapter 9: Problem 18 Control Systems Engineering 7
Consider the unity feedback system of Figure P9.1, with G(s) = \(\frac{K}{(s+3)(s+5)}\) a. Show that the system cannot operate with a settling time of 2/3 second and a percent overshoot of 1.5 % with a simple gain adjustment. b. Design a lead compensator so that the system meets the transient response characteristics of Part a. Specify the compensator’s pole, zero, and the required gain.
Read more -
Chapter 9: Problem 19 Control Systems Engineering 7
Given the unity feedback system of Figure P9.1 with G(s) = \(\frac{K}{(s+2)(s+4)(s+6)(s+8)}\) Find the transfer function of a lag-lead compensator that will yield a settling time 0.5 second shorter than that of the uncompensated system. The compensated system also will have a damping ratio of 0.5, and improve the steady-state error by a factor of 30 . The compensator zero is at -5. Also, find the compensated system's gain. Justify any second-order approximations or verify the design through simulation. [Section: 9.4]
Read more -
Chapter 9: Problem 20 Control Systems Engineering 7
Redo Problem 19 using a lag-lead compensator and MATLAB in the following way: a. MATLAB will generate the root locus for the uncompensated system along with the 0.5 damping-ratio line. You will interactively select the operating point. MATLAB will then proceed to inform you of the coordinates of the operating point, the gain at the operating point, as well as the estimated %OS, \(T_S\), \(T_p\), \(\zeta\), \(\omega_n\), and \(K_p\) represented by a second-order approximation at the operating point. b. MATLAB will display the step response of the uncompensated system. c. Without further input, MATLAB will calculate the compensated design point and will then ask you to input a value for the lead compensator pole from the keyboard. MATLAB will respond with a plot of the root locus showing the compensated design point. MATLAB will then allow you to keep changing the lead compensator pole value from the keyboard until a root locus is plotted that goes through the design point. d. For the compensated system, MATLAB will inform you of the coordinates of the operating point,the gain at the operating point,as well as the estimated %OS, \(T_S\), \(T_p\), \(\zeta\), \(\omega_n\), and \(K_p\) represented by a second-order approximation at the operating point. e. MATLAB will then display the step response of the compensated system. f. Change the compensator’s zero location a few times and collect data on the compensated system to see if any other choices of the compensator zero yield advantages over the original design. g. Using the steady-state error of the uncompensated system, add a lag compensator to yield an improvement of 30 times over the uncompensated system’s steady-state error, with minimal effect on the designed transient response. Have MATLAB plot the step response. Try several values for the lag compensator’s pole and see the effect on the step response.
Read more -
Chapter 9: Problem 21 Control Systems Engineering 7
Given the uncompensated unity feedback system of Figure P9.1, with G(s) = \(\frac{K}{s(s+1)(s+3)}\) do the following: [Section: 9.4] a. Design a compensator to yield the following specifications: settling time = 2.86 seconds; percent overshoot = 4.32%; the steady-state error is to be improved by a factor of 2 over the uncompensated system. b. Compare the transient and steady-state error specifications of the uncompensated and compensated systems. c. Compare the gains of the uncompensated and compensated systems. d. Discuss the validity of your second-order approximation. e. Use MATLAB or any other computer program to simulate the uncompensated and compensated systems and verify the specifications.
Read more -
Chapter 9: Problem 22 Control Systems Engineering 7
For the unity feedback system given in Figure P9.1 with G(s) = \(\frac{K}{s(s+5)(s+11)}\) do the following: [Section: 9.4] a. Find the gain, K, for the uncompensated system to operate with 30% overshoot. b. Find the peak time and \(K_v\) for the uncompensated system. c. Design a lag-lead compensator to decrease the peak time by a factor of 2 , decrease the percent overshoot by a factor of 2, and improve the steady-state error by a factor of 30. Specify all poles, zeros, and gains.
Read more -
Chapter 9: Problem 23 Control Systems Engineering 7
The unity feedback system shown in Figure P9.1 with G(s) = \(\frac{K}{\left(s^2+4 s+8\right)(s+10)}\) is to be designed to meet the following specifications: Overshoot: Less than 22% Settling time: Less than 1.6 seconds \(K_p\) = 15 Do the following: [Section: 9.4] a. Evaluate the performance of the uncompensated system operating at approximately 10% overshoot. b. Design a passive compensator to meet the desired specifications. c. Use MATLAB to simulate the compensated system. Compare the response with the specifications.
Read more -
Chapter 9: Problem 24 Control Systems Engineering 7
Consider the unity feedback system in Figure P9.1, with G(s) = \(\frac{K}{(s+2)(s+4)}\) The system is operated with 4.32% overshoot. In order to improve the steady-state error, \(K_p\) is to be increased by at least a factor of 5. A lag compensator of the form \(G_c(s)\) = \(\frac{(s+0.5)}{(s+0.1)}\) is to be used. [Section: 9.4] a. Find the gain required for both the compensated and the uncompensated systems. b. Find the value of \(K_p\) for both the compensated and the uncompensated systems. c. Estimate the percent overshoot and settling time for both the compensated and the uncompensated systems. d. Discuss the validity of the second-order approximation used for your results in Part c. e. Use MATLAB or any other computer program to simulate the step response for the uncompensated and compensated systems. What do you notice about the compensated system’s response? f. Design a lead compensator that will correct the objection you notice in Part e.
Read more -
Chapter 9: Problem 25 Control Systems Engineering 7
For the unity feedback system in Figure P9.1, with G(s) = \(\frac{K}{(s+1)(s+3)}\) design a PID controller that will yield a peak time of 1.122 seconds and a damping ratio of 0.707, with zero error for a step input. [Section: 9.4]
Read more -
Chapter 9: Problem 26 Control Systems Engineering 7
Repeat Problem 25 for a peak time of 1.047 seconds, a damping ratio of 0.5, zero steady-state error for a step input, and with G(s) = \(\frac{K}{(s+1)^2}\)
Read more -
Chapter 9: Problem 27 Control Systems Engineering 7
For the unity feedback system in Figure P9.1, with G(s) = \(\frac{K}{(s+4)(s+6)(s+10)}\) do the following: a. Design a controller that will yield no more than 25% overshoot and no more than a 2-second settling time for a step input and zero steady-state error for step and ramp inputs. b. Use MATLAB and verify your design.
Read more -
Chapter 9: Problem 28 Control Systems Engineering 7
Redo Problem 27 using MATLAB in the following way: a. MATLAB will ask for the desired percent overshoot, settling time, and PI compensator zero. b. MATLAB will design the PD controller’s zero. c. MATLAB will display the root locus of the PID-compensated system with the desired percent overshoot line. d. The user will interactively select the intersection of the root locus and the desired percent overshoot line. e. MATLAB will display the gain and transient response characteristics of the PID-compensated system. f. MATLAB will display the step response of the PID-compensated system. g. MATLAB will display the ramp response of the PID-compensated system.
Read more -
Chapter 9: Problem 29 Control Systems Engineering 7
If the system of Figure P9.3 operates with a damping ratio of 0.456 for the dominant second-order poles, find the location of all closed-loop poles and zeros.
Read more -
Chapter 9: Problem 30 Control Systems Engineering 7
For the unity feedback system in Figure P9.1, with G(s) = \(\frac{K}{s(s+2)(s+4)(s+6)}\) do the following: [Section: 9.5] a. Design rate feedback to yield a step response with no more than 15% overshoot and no more than 3 seconds settling time. Use Approach 1. b. Use MATLAB and simulate your compensated system.
Read more -
Chapter 9: Problem 31 Control Systems Engineering 7
Given the system of Figure P9.4: [Section: 9.5] a. Design the value of K1, as well as a in the feedback path of the minor loop, to yield a settling time of 4 seconds with 5% overshoot for the step response. b. Design the value of K to yield a major-loop response with 10% overshoot for a step input. c. Use MATLAB or any other computer program to simulate the step response to the entire closed-loop system. d. Add a PI compensator to reduce the major-loop steady-state error to zero and simulate the step response using MATLAB or any other computer program.
Read more -
Chapter 9: Problem 32 Control Systems Engineering 7
Design a PI controller to drive the step-response error to zero for the unity feedback system shown in Figure P9.1, where G(s) = \(\frac{K}{(s+1)(s+3)(s+10)}\) The system operates with a damping factor of 0.4. Design for each of the following two cases: (1) compensator zero at -0.1, and (2) compensator zero at -0.7. Compare the specifications of the uncompensated and each one of the compensated systems. Simulate each one of the systems using any software program.
Read more -
Chapter 9: Problem 33 Control Systems Engineering 7
An inverted pendulum mounted on a motor-driven cart was introduced in Problem 30 in Chapter 3. Its state-space model was linearized around a stationary point, \(x_0\) = 0 (Prasad, 2012). At the stationary point, the pendulum point-mass, m, is in the upright position at t = 0, and the force applied to the cart, \(u_0\), is 0. Its model was then modified in Problem 55 in Chapter 6 to have two output variables: the pendulum angle relative to the y-axis, \(\theta(t)\), and the horizontal position of the cart, x(t). MATLAB was then used to find its eigenvalues. Noting that only one pole (out of four) is located in the left half of the s-plane, we concluded that this unit requires stabilization. To accomplish stability and design an appropriate control system, do the following: a. Draw a signal-flow diagram for Simulink that unit and use it to develop SL Simulink models for two feedback systems: one to control the cart position, x(t), and the other to control the pendulum angle, \(\theta(t)\). Set the upper and lower saturation limits of the second integrator in the angle 100 p to 100 and -100, respectively, and those limits in the position loop to 10 and -10. b. Use rate feedback with a gain of 12.5 to stabilize the pendulum angle control system. The forward path of each of these systems should include a PD (proportional-plus-derivative) controller that adjusts the force applied to the cart, u(t). These controllers \({ }^3\) may be configured with the following settings: P = 5, I = 0, and D = 5 for the cart position controller P = 2, I = 0, and D = 10 for the pendulum angle controller c. Utilizing scopes to capture the two output responses, use a unit-impulse \({ }^5\) as the reference input in the angle control loop and a unit-step source (configured to start at t = 0 with a final value of 1) as the input for the cart position control loop. d. If either of the responses has a steady state error, \(e(\infty)\) > 2%, a peak time, \(T_P\) > 1.2 seconds, or a percent overshoot, %OS > 20.5%, suggest appropriate changes to its controller settings.
Read more -
Chapter 9: Problem 34 Control Systems Engineering 7
Identify and realize the following controllers with operational amplifiers. [Section: 9.6] a. \(\frac{s+0.01}{s}\) b. s + 2
Read more -
Chapter 9: Problem 35 Control Systems Engineering 7
Identify and realize the following compensators with passive networks. [Section: 9.6] a. \(\frac{s+0.1}{s+0.01}\) b. \(\frac{s+2}{s+5}\) c. \(\left(\frac{s+0.1}{s+0.01}\right)\left(\frac{s+1}{s+10}\right)\)
Read more -
Chapter 9: Problem 36 Control Systems Engineering 7
Repeat Problem 35 using operational amplifiers. [Section: 9.6]
Read more -
Chapter 9: Problem 37 Control Systems Engineering 7
The room temperature of an \(11 \mathrm{~m}^2\) room is to be controlled by varying the power of an indoor radiator. For this specific room, the open-loop transfer function from radiator power, \(\dot{Q}(s)\), to temperature, T(s), is (Thomas, 2005) G(s) = \(\frac{T(s)}{\dot{Q}(s)}=\frac{\left(1 \times 10^{-6}\right) s^2+\left(1.314 \times 10^{-9}\right) s+\left(2.66 \times 10^{-13}\right)}{s^3+0.00163 s^2+\left(5.272 \times 10^{-7}\right) s+\left(3.538 \times 10^{-11}\right)}\) The system is assumed to be in the closed-loop configuration shown in Figure P9.1. a. For a unit step input, calculate the steady-state error of the system. b. Try using the procedure of Section 9.2 to design a PI controller to obtain zero steady-state error for step inputs without appreciably changing the transient response. Then explain why it is not possible to do so. c. Design a PI controller of the form \(G_c(s)\) = \(\frac{K(s+z)}{s}\) that will reduce the step-response error to zero while not changing significantly the transient response. (Hint: Place the zero of the compensator in a position where the closed-loop poles of the uncompensated root locus will not be affected significantly.) d. Use Simulink to simulate the systems of Parts b and c and to verify the correctness of your design in Part c.
Read more -
Chapter 9: Problem 38 Control Systems Engineering 7
Figure P9.5 shows a two-tank system. The liquid inflow to the upper tank can be controlled using a valve and is represented by \(F_0\). The upper tank's outflow equals the lower tank's inflow and is represented by \(F_1\). The outflow of the lower tank is \(F_2\). The objective of the design is to control the liquid level, y(t), in the lower tank. The open-loop transmission for this system is \(\frac{Y(s)}{F_o(s)}\) = \(\frac{a_2 a_3}{s^2+\left(a_1+a_4\right) s+a_1 a_4}\) (Romagnoli, 2006). The system will be controlled in a loop analogous to that of Figure P9.1, where the lower liquid level will be measured and compared to a set point. The resulting error will be fed to a controller, which in turn will open or close the valve feeding the upper tank. a. Assuming \(a_1\) = 0.04, \(a_2\) = 0.0187, \(a_3\) = 1, and \(a_4\) = 0.227, design a lag compensator to obtain a step response steady-state error of 10% without affecting the system's transient response appreciably. b. Verify your design through MATLAB simulations.
Read more -
Chapter 9: Problem 39 Control Systems Engineering 7
Figure P9.6(a) shows a heat-exchanger process whose purpose is to maintain the temperature of a liquid at a prescribed temperature. The temperature is measured using a sensor and a transmitter, TT 22, that sends the measurement to a corresponding controller, TC 22, that compares the actual temperature with a desired temperature set point, SP. The controller automatically opens or closes a valve to allow or prevent the flow of steam to change the temperature in the tank. The corresponding block diagram for this system is shown in Figure P9.6(b) (Smith, 2002). Assume the following transfer functions: \(G_v(s)\) = \(\frac{0.02}{4 s+1}\); \(G_1(s)\) = \(\frac{70}{50 s+1}\); H(s) = \(\frac{1}{12 s+1}\) a. Assuming \(G_c(s)\) = K, find the value of K that will result in a dominant pole with \(\zeta\) = 0.7. Obtain the corresponding \(T_s\). b. Design a PD controller to obtain the same damping factor as Part a but with a settling time 20% smaller. c. Verify your results through MATLAB simulation.
Read more -
Chapter 9: Problem 40 Control Systems Engineering 7
Repeat Problem 39, Parts b and c, using a lead compensator.
Read more -
Chapter 9: Problem 41 Control Systems Engineering 7
a. Find the transfer function of a motor whose torque speed curve and load are given in Figure P9.7. b. Design a tachometer compensator to yield a damping ratio of 0.5 for a position control employing a power amplifier of gain 1 and a preamplifier of gain 5000. c. Compare the transient and steady-state characteristics of the uncompensated system and the compensated system.
Read more -
Chapter 9: Problem 42 Control Systems Engineering 7
You are given the motor whose transfer function is shown in Figure P9.8(a). a. If this motor were the forward transfer function of a unity feedback system, calculate the percent overshoot and settling time that could be expected. b. You want to improve the closed-loop response. Since the motor constants cannot be changed and you cannot use a different motor, an amplifier and tachometer are inserted into the loop as shown in Figure P9.8(b). Find the values of \(K_1\) and \(K_f\) to yield a percent overshoot of 15% and a settling time of 0.5 second. c. Evaluate the steady-state error specifications for both the uncompensated and the compensated systems.
Read more -
Chapter 9: Problem 43 Control Systems Engineering 7
A position control is to be designed with a 20% overshoot and a settling time of 2 seconds. You have on hand an amplifier and a power amplifier whose cascaded transfer function is \(K_1 /(s+20)\) with which to drive the motor. Two 10-turn pots are available to convert shaft position into voltage. A voltage of \(\pm 5 \pi\) volts is placed across the pots. A dc motor whose transfer function is of the form \(\frac{\theta_o(s)}{E_a(s)}\) = \(\frac{K}{s(s+a)}\) is also available. The transfer function of the motor is found experimentally as follows: The motor and geared load are driven open-loop by applying a large, short, rectangular pulse to the armature. An oscillogram of the response shows that the motor reached 63% of its final output value at 1/2 second after the application of the pulse. Further, with a constant 10 volts dc applied to the armature, the constant output speed was 100 rad/s. a. Draw a complete block diagram of the system, specifying the transfer function of each component when the system is operating with 20% overshoot. b. What will the steady-state error be for a unit ramp input? c. Determine the transient response characteristics. d. If tachometer feedback is used around the motor, as shown in Figure P9.9, find the tachometer and the amplifier gain to meet the original specifications. Summarize the transient and steady-state characteristics.
Read more -
Chapter 9: Problem 44 Control Systems Engineering 7
A position control is to be designed with a 10% overshoot, a settling time of 1 second, and \(K_v\) = 1000. You have on hand an amplifier and a power amplifier whose cascaded transfer function is \(K_1 /(s+40)\) with which to drive the motor. Two 10-turn pots are available to convert shaft position into voltage. A voltage of \(\pm 20 \pi\) volts is placed across the pots. A dc motor whose transfer function is of the form \(\frac{\theta_o(s)}{E_a(s)}\) = \(\frac{K}{s(s+a)}\) is also available. The following data are observed from a dynamometer test at 50 V. At 25 N-m of torque, the motor turns at 1433 rpm. At 75 N-m of torque, the motor turns at 478 rpm. The speed measured at the load is 0.1 that of the motor. The equivalent inertia, including the load, at the motor armature is 100 kg-\(m^2\), and the equivalent viscous damping, including the load, at the motor armature is 50 N-m-s/rad. a. Draw a complete block diagram of the system, specifying the transfer function of each component. b. Design a passive compensator to meet the requirements in the problem statement. c. Draw the schematic of the compensator showing all component values. Use an operational amplifier for isolation where necessary. d. Use MATLAB or any other computer program to simulate your system and show that all requirements have been met.
Read more -
Chapter 9: Problem 45 Control Systems Engineering 7
Given the system shown in Figure P9.10, find the values of K and \(K_f\) so that the closed-loop dominant poles will have a damping ratio of 0.5 and the underdamped poles of the minor loop will have a damping ratio of 0.8.
Read more -
Chapter 9: Problem 46 Control Systems Engineering 7
Given the system in Figure P9.11, find the values of K and \(K_f\) so that the closed-loop system will have a 4.32% overshoot and the minor loop will have a damping ratio of 0.8. Compare the expected performance of the system without tachometer compensation to the expected performance with tachometer compensation.
Read more -
Chapter 9: Problem 47 Control Systems Engineering 7
Steam-driven power generators rotate at a constant speed via a governor that maintains constant steam pressure in the turbine. In addition, automatic generation control (AGC) or load frequency control (LFC) is added to ensure reliability and consistency despite load variations or other disturbances that can affect the distribution line frequency output. A specific turbine-governor system can be described only using the block diagram of Figure P9.1 in which G(s) = \(G_c(s) G_g(s) G_t(s) G_m(s)\), where (Khodabakhshian, 2005) \(G_g(s)\) = \(\frac{1}{0.2 s+1}\) is the governor's transfer function \(G_t(s)\) = \(\frac{1}{0.5 s+1}\) is the turbine transfer function \(G_m(s)\) = \(\frac{1}{10 s+0.8}\) represents the machine and load \(G_c(s)\) is the LFC compensation to be designed a. Assuming \(G_c(s)\) = K, find the value of K that will result in a dominant pole with \(\zeta\) = 0.7. Obtain the corresponding \(T_s\). b. Design a PID controller to obtain the same damping factor as in Part a, but with a settling time of 2 seconds and zero steady-state error to step input commands. c. Verify your results using a MATLAB simulation.
Read more -
Chapter 9: Problem 48 Control Systems Engineering 7
Repeat Problem 47 using a lag-lead compensator instead of a PID controller. Design for a steady-state error of 1% for a step input command.
Read more -
Chapter 9: Problem 49 Control Systems Engineering 7
Digital versatile disc (DVD) players incorporate several control systems for their operations. The control tasks include (1) keeping the laser beam focused on the disc surface, (2) fast track selection, (3) disc rotation speed control, and (4) following a track accurately. In order to follow a track, the pickup-head radial position is controlled via a voltage that operates a voice coil embedded in a magnet configuration. For a specific DVD player, the transfer function is given by P(s) = \(\frac{X(s)}{V(s)}\) = \(\frac{0.63}{\left(1+\frac{0.36}{305.4} s+\frac{s^2}{305.4^2}\right)\left(1+\frac{0.04}{248.2} s+\frac{s^2}{248.2^2}\right)}\) where x(t) = radial pickup position and v(t) = the coil input voltage (Bittanti, 2002). a. Assume that the system will be controlled in a closed-loop configuration, such as the one shown in Figure P9.1. Assuming that the plant, P(s), is cascaded with a proportional compensator, \(G_c(s)\) = K, plot the root locus of the system. b. Repeat Part a using MATLAB if your root locus plot was created by any other tool. c. Find the range of K for closed-loop stability, the resulting damping factor range, and the smallest settling time. d. Design a notch filter compensator so that the system's dominant poles have a damping factor of \(\zeta\) = 0.7 with a closed-loop settling time of 0.1 second. e. Simulate the system’s step response for Part c using MATLAB. f. Add a PI compensator to the system to achieve zero steady-state error for a step input without appreciably affecting the transient response achieved in Part b. g. Simulate the system’s step response for Part e using MATLAB.
Read more -
Chapter 9: Problem 50 Control Systems Engineering 7
A coordinate measuring machine (CMM) measures coordinates on three-dimensional objects. The accuracy of CMMs is affected by temperature changes as well as by mechanical resonances due to joint elasticity. These resonances are more pronounced when the machine has to go over abrupt changes of dimension, such as sharp corners at high speed. Each of the machine links can be controlled in a closed-loop configuration, such as the one shown in Figure P9.12, designed for a specific machine with prismatic (sliding) links. In the figure, \(X_{\text {ref }}(s)\) is the commanded position and X(s) is the actual position. The minor loop uses a tachometer generator to obtain the joint speed, while the main loop controls the joint's position (Özel, 2003). a. Find the value of K that will result in a minor loop with \(\zeta\) = 0.5. b. Use a notch filter compensator, \(G_c(s)\), for the external loop so that it results in a closed-loop damping factor of \(\zeta\) = 0.7 with \(T_s \approx 4\) seconds. c. Use MATLAB to simulate the compensated system’s closed-loop step response
Read more -
Chapter 9: Problem 51 Control Systems Engineering 7
An X-4 quadrotor flyer is designed as a small-sized unmanned autonomous vehicle (UAV) that flies mainly indoors and can help in search and recognizance missions. To minimize mechanical problems and for simplicity, this aircraft uses fixed pitch rotors with specially designed blades. Therefore, for thrust it is necessary to add a fifth propeller. A simplified design of the thrust control design can be modeled as in Figure P9.1 with G(s) = \(G_c(s) P(s)\) where P(s) = \(\frac{1.90978\left(\frac{s}{0.43}+1\right)}{\left(\frac{s}{9.6}+1\right)\left(\frac{s}{0.54}+1\right)}\) represents the dynamics of the thruster rotor gain, the motor, and the battery dynamics. Initially, the system is designed using a proportional compensator given by \(G_c(s)\) = 3 (Pounds, 2009). a. Calculate the resulting steady-state error for a unit step input. b. Design a lag compensator to yield half the steady state error of the proportional compensator, without appreciably affecting the system’s transient response. c. Use MATLAB to simulate the original design and the lag compensated design. Verify your results.
Read more -
Chapter 9: Problem 52 Control Systems Engineering 7
Problem 8.54 described an ac/dc conversion and power distribution system for which droop control is implemented through the use of a proportional controller to stabilize the dc-bus voltage. For simplification, a system with only one source converter and one load converter was considered. The parameters and design considerations presented in that problem, along with some solution results, allow us to represent the block-diagram of that system as shown in the Figure P9.13. Here \(G_c(\mathrm{~s})\) is the transfer function of the controller, \(G_p(\mathrm{~s})\) represents the forward path of the controlled plant (a conversion and power distribution unit), and H(s) is the transfer function of the feedback low-pass filter (Karlsson, 2003). Prepare a table, such as Table 9.5, where the first column, headed Uncompensated, is filled in with your results from the proportional design of Problem 8.54, assuming an input step, \(v_{d c-r e f}(t)\) = 750 u(t). Follow Steps 2-8 as described in Section 9.4 (Example 9.5), to design a proportional-plus-integral plus-derivative (PID) controller so that the system can operate with a percent overshoot \(\leq 4.4 \%\), a peak time 20% smaller than that of the uncompensated system, and zero steady-state error, \(e_{V \text { step }}(\infty)\) = 0. Fill in the remaining two columns of your table, PD-compensated and PID-compensated.
Read more -
Chapter 9: Problem 53 Control Systems Engineering 7
Testing of hypersonic flight is performed in wind tunnels where maintaining a constant air pressure is important. Air pressure control is accomplished in several stages. For a specific setup, a simplified transfer function has been found to be (Varghese, 2009) \(\frac{P(s)}{M(s)}\) = \(\frac{-2.369 \times 10^6 s^2+7.897 \times 10^7 s+4.21 \times 10^5}{0.015 s^5+0.7802 s^4+9.89 s^3+18.46 s^2+3.377 s+0.01937}\) where M(s) is the stem movement of a valve feeding compressed air into the storage tank, and P(s) is the settling chamber pressure. In order to achieve steady-state error, design a PI controller that operates with a damping factor of 0.4. Compare the characteristics of the uncompensated and compensated systems, and use a computer program to simulate the step response to the compensated system.
Read more -
Chapter 9: Problem 54 Control Systems Engineering 7
A metering pump is a pump capable of delivering a precise flow rate of fluid. Most metering pumps consist of an electric motor that varies the strike length of a shaft, allowing more or less fluid to pass through its body. The control of such a valve has been considered and the open-loop transfer function of the pump was found to be (Yu, 2011) \(\frac{U(s)}{Y(s)}\) = \(\frac{1.869}{s^2+12.32 s+0.4582}\) where the output of the system, Y(s), represents the liquid flow, and the input, U(s), is the command signal to the motor that varies the pump's plunger strike length. a. Design a PID controller to reduce the steady-state error to zero with a maximum 5\% overshoot and a 20% reduction in uncompensated settling time. b. Find the characteristics of the uncompensated system. c. Design a PID controller to reduce the steady-state error to zero; achieve a maximum 5\% overshoot and a 20% reduction in uncompensated settling time. d. Simulate the step response for the compensated system to verify the validity of your design.
Read more -
Chapter 9: Problem 55 Control Systems Engineering 7
A linear model of the \(\alpha\)-subsystem of a grid-connected converter (Mahmood, 2012) with a Y-Y transformer was presented as the plant in Problem 69 in Chapter 8. You were asked to find the transfer function of that plant, \(G_P(s)\) = \(\frac{V_a(s)}{M_a(s)}\) (see Figure P8.20(b)). a. Use the results of your solution to Problem 69, Chapter 8, to write the open-loop transfer function in pole-zero form with a unity gain. Then design a PID controller to yield a zero steady-state error for a step input with an overshoot of less than 10% and a natural frequency of 135.3. b. Plot the time response, c(t), marking on it all relevant characteristics, such as the percent overshoot (if any), rise time, settling time, and final steady-state value. Also find all closed-loop poles of this system and the velocity error constant, \(K_v\). Do you have any observations about the time response and/or the poles?
Read more -
Chapter 9: Problem 56 Control Systems Engineering 7
Design a PID controller for the drive system of Problem 56, Chapter 8, and shown in Figure P8.15 (Thomsen, 2011). Obtain an output response, \(\omega_L(t)\), with an overshoot \(\leq 15 \%\), a settling time of preferably 0.2 second, but not more than 5 seconds, a zero steady-state position error, and a velocity error of < 2%, for a step input, \(\omega_r(t)\) = 260 u(t) rad/sec, applied at t = 0.
Read more -
Chapter 9: Problem 57 Control Systems Engineering 7
Control of HIV/AIDS. It was shown in Chapter 6, Problem 68, that when the virus levels in an HIV/ AIDS patient are controlled using RTIs the linearized plant model is P(s) = \(\frac{Y(s)}{U_1(s)}=\frac{-520 s-10.3844}{s^3+2.6817 s^2+0.11 s+0.0126}\) Assume that the system is embedded in a configuration, such as the one shown in Figure P9.1, where G(s) = \(G_c(s) P(s)\). Here, \(G_c(s)\) is a cascade compensator. For simplicity in this problem, choose the dc gain of \(G_c(s)\) less than zero to obtain a negative feedback system (the negative signs of \(G_c(s)\) and P(s) cancel out) (Craig, I. K., 2004). a. Consider the uncompensated system with \(G_c(s)\) = -K. Find the value of K that will place all closed-loop poles on the real axis. b. Use MATLAB to simulate the unit-step response of the gain-compensated system. Note the %OS and the \(T_s\) from the simulation. c. Design a PI compensator so that the steady-state error for step inputs is zero. Choose a gain value to make all poles real. d. Use MATLAB to simulate the design in Part c for a unit step input. Compare the simulation to Part b.
Read more -
Chapter 9: Problem 58 Control Systems Engineering 7
Hybrid vehicle. In the previous chapter, we used the root locus to design a proportional controller for the speed control of an HEV. We rearranged the block diagram to be a unity feedback system, as shown in the block diagram of Figure P7.31 (Preitl, 2007). The plant and compensator resulted in G(s) = \(\frac{K(s+0.60)}{(s+0.5858)(s+0.0163)}\) and we found that K = 0.78 resulted in a critically damped system. a. Use this design to itemize the performance specifications by filling in a table, similar to Table 9.5, under the column Uncompensated. Take advantage of the results from Chapter 8 or use MATLAB to find the entries. Plot c(t) for r(t) = 4 u(t) volts. Now assume that the system specifications require zero steady-state error for step inputs,a steady-state error for ramp inputs \(\leq\) 2%,a %OS (\leq\) 4.32%,and a settling time (\leq\) 4 sec. It should be evident that this is not accomplished with a proportional controller. Thus, start by designing a PI controller to meet the requirements. If necessary, add a PD mode to get a PID controller. Simulate your final design using MATLAB. Fill in the results of this design in the second column of your table with the heading Compensated. c. Now note the following limitations of linear control system modeling: 1. No limit is set on system variables. For example, vehicle acceleration as well as motor and power amplifier current, torque or power do not have upper limits. 2. It is assumed that to improve the speed of response in Part b, we could place the PI controller’s zero on top of the pole closest to the origin. Realistically, such pole-zero cancellation is not always possible to maintain. If you do not expand your model beyond the described limitations if required for accuracy, unrealistic response characteristics, such as rise and settling times could result. Look at your design results including response curves. Are they realistic? If not,revise your Simulink model,which you developed for Problem 5.79, according to the following 4 steps: i. Represent the motor armature as a first-order system with a unity steady-state gain and a time constant of 50 ms,which avoids the creation of internal algebraic closed-loops and should have negligible effect on system response; ii. Add a saturation element at the output of the motor armature and set it to an upper limit of 250 A; iii. Use the following PI settings. The PI settings of the speed controller are P = 61 and I = 0.795. The PI settings of the torque controller are P = 10 and I = 6; iv. Run the modified model and comment on the graphs obtained for motor current, car acceleration, and speed.
Read more -
Chapter 9: Problem 59 Control Systems Engineering 7
Parabolic trough collector. The parabolic trough collector (Camacho, 2012) is a Type 0 system as can be seen from its transfer function, G(s) = \(\frac{137.2 \times 10^{-6} K}{s^2+0.0224 s+196 \times 10^{-6}} e^{-39 s}\) We want the system operating in the critically damped mode, but with reduced steady-state error. Using the root locus and a Padé approximation, \(e^{-s T} \approx \frac{1-\frac{T}{2} s}{1+\frac{T}{2} s}\), do the following: a. Substitute the Padé approximation for the delay and find the gain necessary to have the system operating with a damping factor, \(\zeta\) = 0.5. Also, find the corresponding steady-state error. b. Design a PI compensator to obtain a zero steady-state error while maintaining \(\zeta\) = 0.5. c. Simulate the resulting design using MATLAB to verify your design.
Read more